Zum Einsatz kommen Mikroprozessoren (ähnlich die des “Arduino”-Projektes), die mit einer Sendeeinheit im 868 MHz-Band ausgestattet sind.
Warum Arduino-kompatibel?
- Der Arduino (bzw. seine diversen kompatiblen Distributionen) wurde zunächst deshalb gewählt, weil er quelloffen und verfügbar ist. Da es diverse Projekte mit der Kombination Arduino-kompatibel mit einem 868-MHz-Sendemodul “on-Board” gibt (Fludder ist hier eines der neueren), diese zum Teil auch identische Sendemodule verwenden, ist bei Wegfall eines Lieferanten der Wechsel zu einem Neuen problemlos möglich.
- Der Arduino hat eine Vielzahl von Schnittstellen, die zum Teil auch Interrupts unterstützen. So kann der Arduino in einen stromsparenden Schlafmodus gesetzt werden und über einen Interrupt aufgeweckt werden. Der entscheidende Impuls zum Aufwecken kann hierbei über einen Bewegungssensor, einen Magnetkontakt oder auch andere Techniken erfolgen.
- Der Preis. Eines der entscheidenden Kriterien. Arduinos (bzw. ihre kompatiblen Pendants) sind in einem Bereich von 20 – 40 € zu erwerben.
- Die Möglichkeiten und die Community: Es gibt eine Vielzahl von Modulen, mit denen der Arduino erweitert werden kann, beispielsweise GSM-Modems, Bewegungsmelder, andere Funkfrequenzen, usw.
Der grundlegende Aufbau
Die nachfolgende Abbildung zeigt den grundlegenden Aufbau des geplanten Systems:
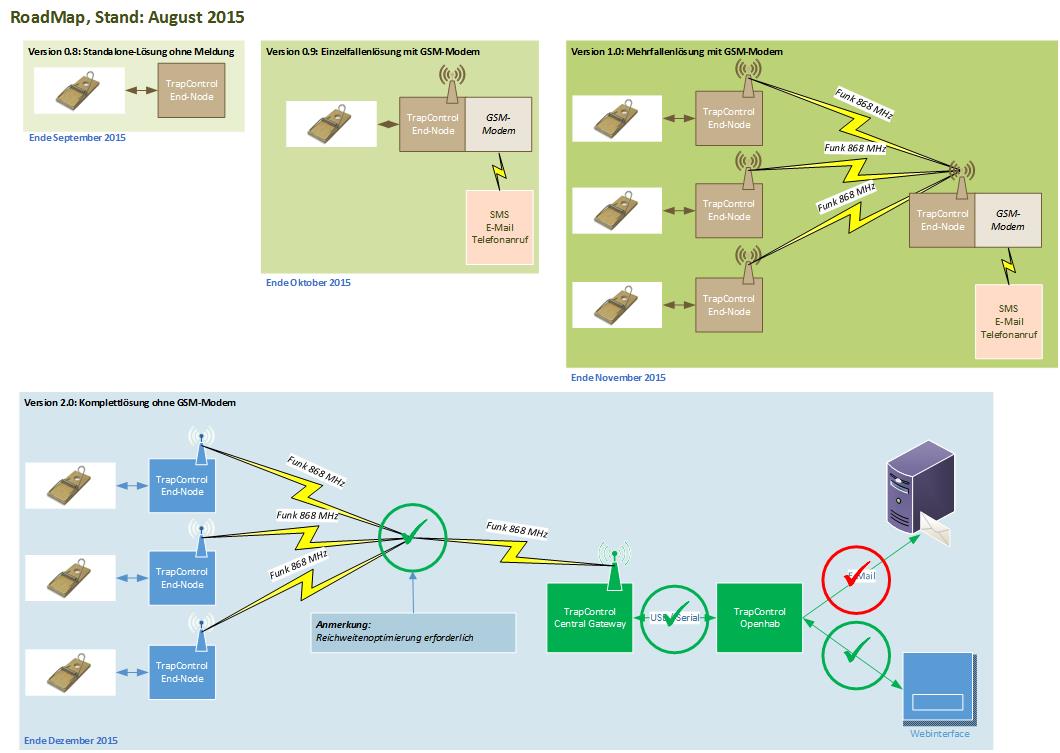
Im Bild seht Ihr die Fallen (Symbol der Mausefalle), die gesteuert bzw. überwacht werden sollen. An jeder Falle befindet sich ein “TrapControl”-End-Knoten (“End-Node”). Dieser hat zunächst den Zweck, die Falle zu steuern, d.h. aufgrund unterschiedlicher Sensoren (Bewegung, Temperatur, Magnetkontakt o.ä.) ein Ereignis festzustellen (Beispiel: “Fuchs betritt Falle”), dann zu reagieren (“Falle schließen”) und eventuell eine Meldung abzusetzen. Abhängig von der geplanten Version wird dies nicht (Version 0.8), via GSM-Modem (Version 0.9 für eine einzelne Falle, Version 1.0 für mehrere Fallen) oder nur per Funk (Version 2.0) passieren.
Das Benutzerinterface (so die erste Planung) der Version 2.0 soll unter Nutzung eines Systems, mit dem eigentlich Sensoren im häuslichen Bereich erfasst, bzw. Module gesteuert werden können, realisiert werden: Openhab. Dieses System soll auf einem kostengünstiges Mikroprozessor (Raspberry Pi 2) betrieben werden. Auf dieses System kann der Endnutzer auf die Daten der Fallen zugreifen und auch die Fängigkeit der Fallen steuern.
So wurde die ursprüngliche Planung der späteren Entwicklung des GSM-Modells geändert. Details zur aktuellen Planung findet Ihr in der Roadmap.